

محصولی اورجینال و آکبند، موجود در فروشگاه رایان
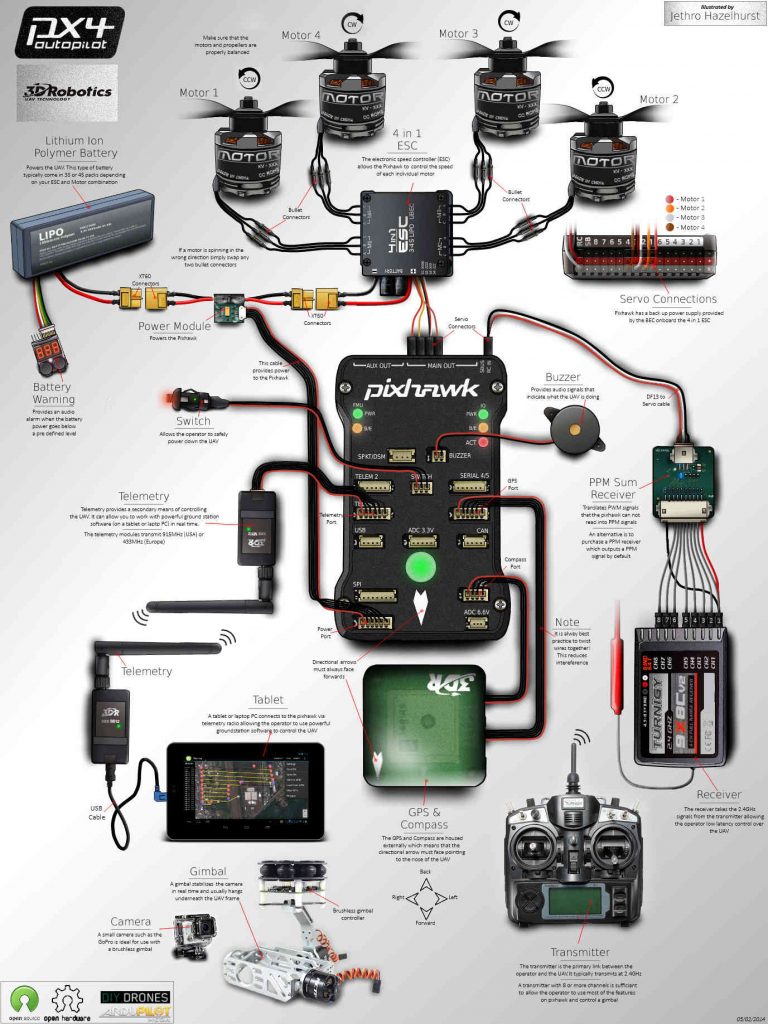
خلبان خودکار Pixhawk بر مبنای یک سیستم کنترل پرواز همه کاره پیشرفته و ماژولار در اختیار شما قرار میدهد که قادر است تمام نیاز شما را به راحتی برآورده سازد . مودهای پروازی متنوع و در اختیار داشتن مودهایی مانند اتو هاور یا اتو لندینگ و یا کنترل گیمبال و پایه ریترکت و استفاده از چترنجات و در اختیار داشتن اطلاعات پرواز به صورت تله متری از جمله آنها میباشد. این فلایت کنترل از انواع رادیو ها ساپورت مینماید.
 درگاه ها
درگاه ها
فلایت کنترلر Pixhawk معمولاً از طریق پورت Power آن، نیرو می گیرد. پورت Power در زمانی که برق فلایت Pixhawk را تامین می کند، می تواند توسط یک ماژول که به صورت اختیاری روی فلایت کنترلر قرار می گیرد اندازه ولتاژ و جریان آنالوگ را اندازه گیری کند و بخواند. مزیت بزرگی که پیکس هاوک دارد این است که میتوانید انواع سنسور و ماژول را به آن وصل کنید. فلایت کنترل پیکس هاوک با پروتکل های ارتباطی رسیور رادیو کنترل، PPM، گیرنده Futaba S.Bus، گیرنده های Spektrum DSM و DSM2، گیرنده های ماهواره ای Spektrum DSM-X و گیرنده MULTIPLEX SRXL نسخه ۱ و نسخه ۲ سازگار است. برای گیرنده های قدیمی که برای هر کانال یک سیم را مورد استفاده قرار می دهند (PWM) می توان از پروتکل PPM خروجی گیرنده به PPM-SUM استفاده کرد. پورت های GPS با سیم ۶ پین DF13 متصل می شوند و پورت MAG ( قطب نما ) با سیم ۴ پین DF13 به پورت I2C وصل شده است. فلایت کنترل پیکسهاوک pixhawk

کاربرد فلایت کنترلر Pixhawk:
کنترل و هدایت سیتم های بدون سرنشین (هواپیما، هلیکوپتر، مولتی روتور، ماشین، قایق و سایر)
مشخصات فلایت کنترلر Pixhawk:
۱.پردازنده: کورتکس ۳۲ بیتی M4
۲.فرکانس اصلی: ۲۵۶ کیلوهرتزی با رم ۱۶۸ مگاهرتز
۳.سنسورژِیروسکوپی ۳ محوره دیجیتال ۱۶ بیتی L3GD20
۴.شتاب سنج ۳ محوره ۱۴ بیتی LSM303D
۵.سنسورمغناطیس سنج ۳ محوره ۱۴ بیتی MPU6000
.فشار سنج دقت بالا MS5611
۷.پنج پورت ارتباطی UART
۸.دو درگاه ارتباطی CAN
۹.گیرنده ماهواره ای Spektrum DSM/DSM2/DSM-X
۱۰.پورت ارتباطی I2C و SPI
۱۱.دارای ۱۴ پورت خروجی PWM
 فلایت کنترل پیکسهاوک pixhawk
فلایت کنترل پیکسهاوک pixhawk
Description:
Pixhawk is an advanced autopilot system designed by the PX4 open-hardware project and manufactured by 3D Robotics. It features advanced processor and sensor technology from ST Microelectronics® and a NuttX real-time operating system, delivering incredible performance, flexibility, and reliability for controlling any autonomous vehicle. Pixhawk intergrated the newest 32 bit chip technology and sensor technology, get rid of the dilemma of having only 8 bit CPU of APM, and CPU occupancy being too high.
The benefits of the Pixhawk system include integrated multithreading, a Unix/Linux-like programming environment, completely new autopilot functions such as Lua scripting of missions and flight behavior, and a custom PX4 driver layer ensuring tight timing across all processes. These advanced capabilities ensure that there are no limitations to your autonomous vehicle. Pixhawk allows existing APM and PX4 operators to seamlessly transition to this system and lowers the barriers to entry for new users to participate in the exciting world of autonomous vehicles.
:Features
:Processor
۳۲ bit 2M flash memory STM32F427 Cortex M4, with hardware floating point processing unit
Main frequency: 256K, 168MHZ RAM
Sensor:
L3GD20 3 axis digital 16 bit gyroscope
LSM303D 3 axis 14 bit accelerometer /magnetometer
MPU6000 6 axis accelerometer / magnetometer
MS5611 high precision barometer
Interface:
۵* UART, 1*compatible high voltage, 2*hardware flow control
۲*CAN
Spektrum DSM/DSM2/DSM-X satellite receiver compatible input
Futaba SBUS compatible input and output
PPM signal input
RSSI (PWM or voltage) input
I2C
SPI
۳.۳ and 6.6VADC input
External USB MICRO interface
۱۴ PWM/ Servo Output
Real time operation system







هنوز نظری وجود ندارد.